Spinning ping pong balls around 2 axes. Intricate patterns turn into concentric circles. High speed, high precision stepper motors with custom drivers controlled by FPGAs solving 5th-order equations in realtime, with a focus on event timing. Also filmed with cameras to be presented on a series of monitors.
Tag Archives: PCB design
Zweite Konservatorische Maßnahme
ZKM= Zweite Konservatorische Maßnahme
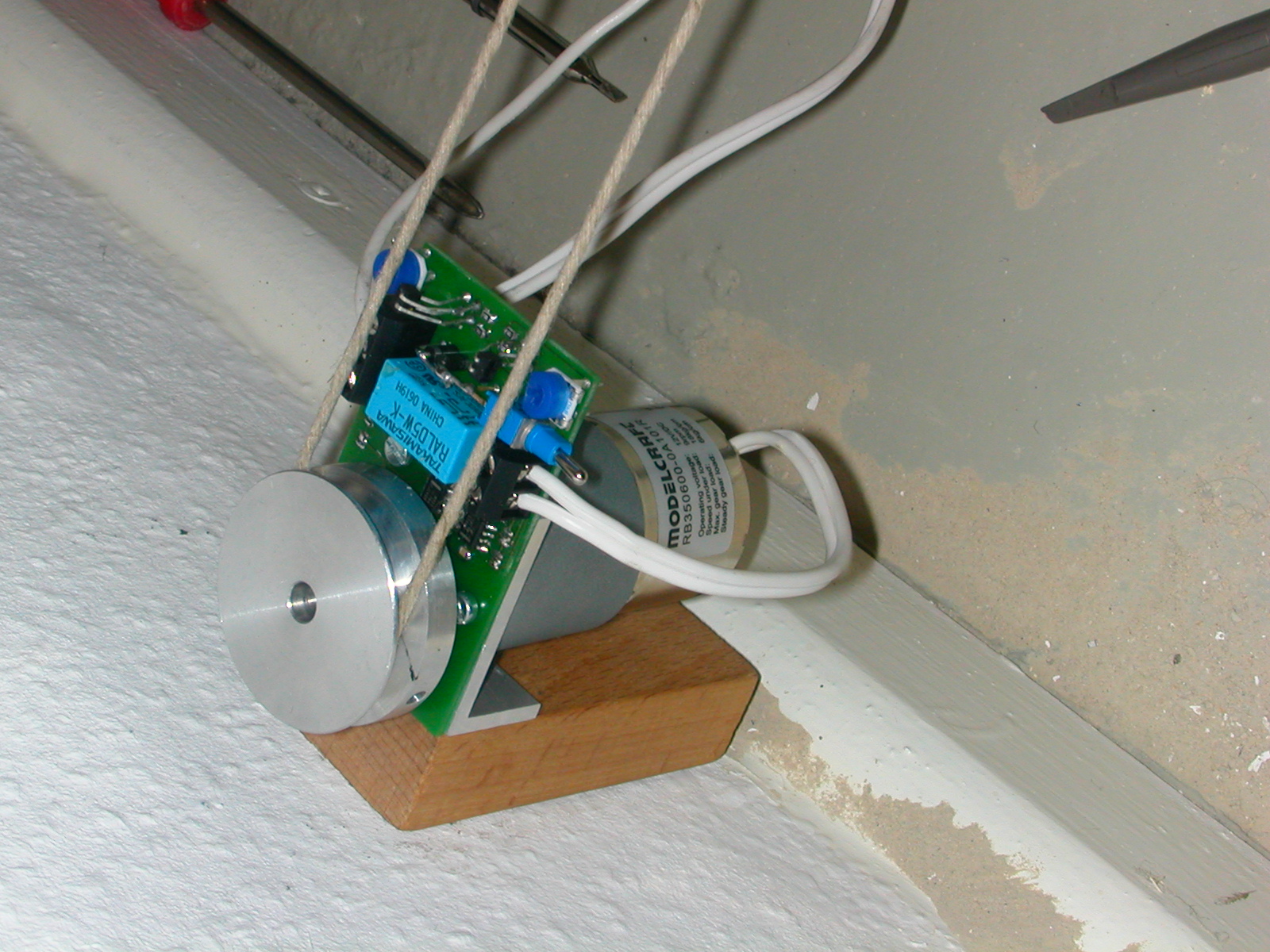
Installation controller
Thoughts Go By Air
A swarm of flying robots with independent behaviour and a dynamic wireless network.
quaDAC
A four-channel audio converter for the NeXT cube and the ispw (i.e. the IRCAM signal processing workstation).
This started as a hack with a couple of evaluation boards and some blobs of glue logic. With help from Atau Tanaka, and the original design by CCRMA.The second version though had its own board and features analog inputs as well as AES/EBU and S/PDIF. It was designed around an FPGA (by Xilinx) to allow for easy modification in the event that other customers might want to run it off a different machine. These days, however, with tons of multi-channel soundcards available it’s hard to thrill people with quadro…